| | IVS | FIN | OvGU | |
Echtzeitsysteme und Kommunikation |

Softwareprojekt/IT-Projekt
Teamrobotik

Praktische Erfahrungen mit Problemstellungen eingebetteter Echtzeitsysteme können Studenten mit Hilfe von Baukastensystem für modular aufgebaute, mobile Roboter sammeln. Im Rahmen eines Softwarepraktikums müssen mit Hilfe von selbst zu entwerfenden Robotern Aufgaben gelöst werden, etwa das Verfolgen einer Linie, Interaktion mit anderen Robotern oder die Manipulation der Umgebung. Dabei müssen insbesondere folgende Teilaufgaben gelöst werden:
- Erarbeitung einer Lösungsstrategie
- Entwurf des Roboterdesigns
- Modellierung des Systemverhaltens
- Entwurf und Implementierung der Robotersteuerung
- Test und Dokumentation
Das Ergebnis der Lösungen wird am Ende des Projekts öffentlich demonstriert und in der Regel in einem Wettbewerb getestet.
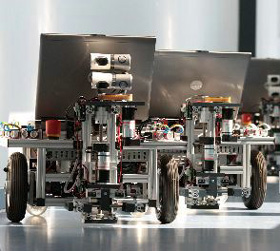
Seit 2009 werden als Hardware die Roboterplattformen Volksbot® vom Fraunhofer IAIS mit COMPactRIO Steuerungen von National Instruments eingesetzt. Diese wurden in den vorausgegangenen IT-Projekten zusätzlich mit Laserscannern und mit einer Videokamera erweitert.
2009Seite der Lehrveranstaltung WS-09/10 Seite der Lehrveranstaltung SS-09 2008Seite der Lehrveranstaltung SS-08 2007Seite der Lehrveranstaltung SS-07
|
Software Projekt WS 0910Get the Flash Player to see this player. Kontakt: |
2006
Seite der Lehrveranstaltung SS-06
- Präsentation der Gruppe 1
- Präsentation der Gruppe 2
- Präsentation der Gruppe 3
- Präsentation der Gruppe 4
- Präsentation der Gruppe 5
- Präsentation der Gruppe 6
2005
Seite der Lehrveranstaltung SS-05
2004
- Präsentation der Gruppe1
- Präsentation der Gruppe2
- Präsentation der Gruppe3
- Präsentation der Gruppe4
- Präsentation der Gruppe5
2003
2002
2001
- Präsentation der Gruppe1
- Präsentation der Gruppe2
- Präsentation der Gruppe3
- Präsentation der Gruppe4
- Präsentation der Gruppe5
2000
Einführung und Aufgabenstellung (Powerpoint-Präsentation)
Ergebnisse und Schnappschüsse