| | IVS | FIN | OvGU | |
Echtzeitsysteme und Kommunikation |

Labor : Snapshots
 Softwarepraktikum
im Sommersemester 2000 Softwarepraktikum
im Sommersemester 2000 |
 |
Die Fähigkeit zu kooperieren und Probleme im Team zu lösen, macht mobile autonome Systeme beträchtlich effizienter und verbessert die Einsatzmöglichkeiten in vielen Anwendungsgebieten. Um die Studenten in zukünftige Forschungsaktivitäten der Arbeitsgruppe EuK einbeziehen zu können, wurde ein Praktikum angeboten, in dem grundlegenden Fertigkeiten erlernt werden können, die für den Entwurf und die Realisierung kooperativer autonomer Roboter nötig sind, wie z.B.: mechanische Konstruktion von mobilen Robotern, Sensor-Aktor-Schnittstellen, Grundlagen der Bewegungssteuerung, Infrarot-Kommunikation und Koordination zwischen den Robotern.
Da ein Wettbewerb bekanntlich die Motivation erhöht, wurde der Kurs als "Kooperatives Wettrennen" betitelt.
Aufgabenstellung

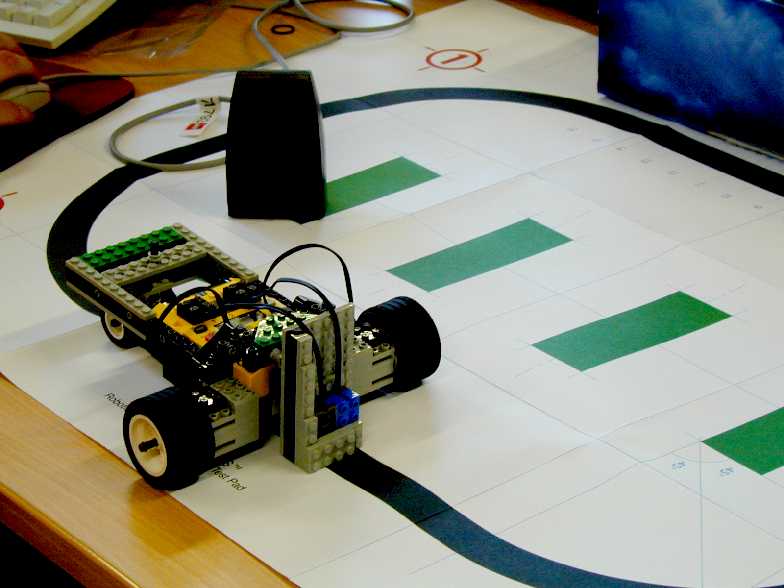
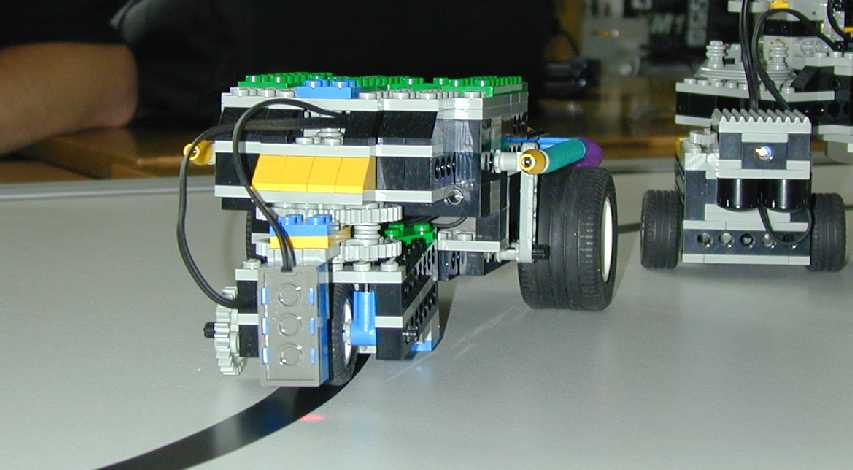
Jede Gruppe musste ein Team aus 2 Robotern bauen. Ein Roboter des Teams
konnte mit Lichtsensoren bestückt werden, um eine Linie auf dem Parcour
zu finden und dieser zu folgen. Über Infrarotkommunikation musste
dieser "sehende" Roboter dann seinen "blinden" Teamkollegen zum Ziel führen.
Die Herausforderung bestand in der Teilnahme an einem "kooperativen Wettrennen"
zum Ende des Semesters, bei dem
das schnellste Team gewinnt.
So trafen sich im März 2000 4 Gruppen á 4 Studenten in unserem Labor, um die Aufgabenstellung und je 2 Baukästen des Mindstorm Robotic Invention Systems in Empfang zu nehmen.
Teamarbeit

Die LEGO - Roboter stellen eine relativ preisgünstige Testumgebung
für die eigenständige Bearbeitung komplexer Aufgabenstellungen
dar. Zukünftige Ingenieure und Informatiker können sich
fächerübergreifend und mit Spaß und Erfolg gleichzeitig
mit Programmierung, Sensorik, Kommunikation, mechanischer Konstruktion
und anderen Themen befassen.
Die Gruppen hatten die gleiche Basis an Hardware zur benutzen (je 2
Lego Mindstorms Robotics Baukästen), es stand ihnen jedoch frei,
eine beliebige frei verfügbare Software einzusetzen, die am besten
zur Problemlösung geeignet war.
Während der Teamtreffen und beim Abschlußwettbewerb zeigte
es sich, dass die Variantenvielfalt der präsentierten mechanischen
Roboterdesigns sowie der verwendeten Softwarekomponenten und Lösungswege
höher war als erwartet.
 |
 |
 |
Erfreulich war, dass in allen Teams schon nach kurzer Zeit eine gute
Zusammenarbeit und Aufgabenverteilung zu beobachten war. So trugen schon
bald Spezialisten für Sounddesign, Rolle rückwärts oder
Linie erschnüffeln zu Spaß und Motivation ihren Teil auf
dem Weg zum Ziel bei.
Um nicht nur die technischen sondern auch die sozialen Fähigkeiten
zu trainieren, mussten die Gruppen ihre Lösungswege und Designentscheidungen
in einer Zwischen- und einer Endpräsentation vor der Gruppe darlegen.
Präsentation
 |
 |
 |
Ergebnisse
Somit mussten im Rahmen dieses Softwarepraktikums von allen Gruppen eine ganze Reihe von Aufgaben bewältigt werden:
- Auswahl einer Software/ Einarbeitung in die Programmierumgebung
- Erarbeitung einer Lösungsstrategie
- Entwurf des Roboterdesigns
- Konstruktion der Roboter
- Präsentation der Lösungen der Teilaufgaben und Diskussion der Lösungsvorschläge
- Kommunikationskonzept
- Tests, Wettbewerb, Präsentation und Dokumentation
Alle Gruppen bestanden diese komplexen Anforderungen mit guten Ergebnissen, wie die Präsentationen der Gruppen selbstredend zeigen .