| | IVS | FIN | OvGU | |
Echtzeitsysteme und Kommunikation |

Forschung : Projekte : Realisierung adaptiver Laufbewegungen
Dynamisches Echtzeit-Scheduling zur Realisierung adaptiver Laufbewegungen
Unter Beachtung sowohl innerer als auch äußerer Systemzustände müssen die Bewegungen der Beine eines Laufroboters koordiniert werden. Die Umsetzung regulärer Laufmuster in Verbindung mit Körperbewegungen wurde mit dem Laufroboter Katharina erfolgreich demonstriert. Für ein adaptives Laufen, d.h. die Anpassung an wechselnde Umgebungen (Bodenform, Hindernisse), steht ein entscheidend wichtiges Problem im Mittelpunkt: echtzeitfähige Ressourcenplanung, -nutzung und -scheduling aller an der Laufbewegung beteiligten Prozesse. Bisherige Lösungsansätze nutzten vorwiegend statische oder spezielle abgestimmte Schedulingmodelle.
Zur Verbesserung der Echtzeitfähigkeit und Adaptivität unter einer sich verändernden Systemumgebung wird nun untersucht, welche bestehenden Schedulingmethoden zur Schrittplanung und -ausführung nutzbar oder neu zu entwerfen sind und wie diese sich auf das Design von Steuerungssystemen für Laufmaschinen erfolgreich anwenden lassen. Die gefundenen Algorithmen werden auf einer realen Laufmaschine implementiert und evaluiert.
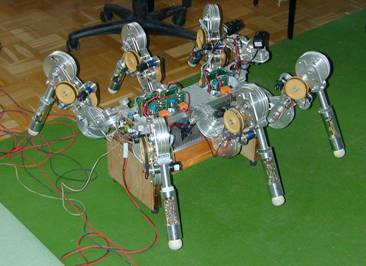
Der Lauron-Laufroboter
Ziele
In dem Projekt werden die folgenden Ziele verfolgt:
- automatisches Erzeugen von Laufbewegungen zur Realisierung abstrakter Bewegungskommandos
- Erzeugen auch nicht-regulärer Laufmuster mit Hilfe vorgegebenen Kriterien, beispielsweise Bedingungen der statischen Stabilität oder der Körpergeschwindigkeit
- Lösung des Problems der Steurungsmodi und deren Übergänge durch Nutzung von Schedulingmethoden
- Formulierung von Methoden zum echtzeitgerechten Entwurf von Laufroboter-Steuerungssystemen am Beispiel eines vorhandenen Steuerungssystem
- Auswahl geeigneter Schedulingtechniken, die die Einhaltung der Echtzeitbedingungen unterstützen und dabei Rechenressourcen optimal nutzen
- Erprobung der gefundenen Methoden an einem vorhandenen Steuerungssystem
Zum Erreichen dieser Ziele sind folgende Teilaufgaben zu lösen:
- Analyse von ausgewählten Laufmustern und Laufalgorithmen hinsichtlich der Gewährleistung der statischen Stabilität und Formulierung von Kriterien zu ihrer Prüfung, insbesondere in der Planungsphase.
- Beschreibung der statischen Stabilität als Ressourcenproblem. Dazu werden die Laufmuster einer Dekomposition zu Primitiven unterzogen, um sie in die Problembeschreibung einzubeziehen.
- Entwurf eines geeigneten Schedulers, der unter Einhaltung der Bedingungen der statischen Stabilität Bewegungssequenzen (aus den Primitiven) erzeugt. Schrittweise Einbeziehung zusätzlicher Bedingungen (Positionierkommandos, Störungen).
- Implementierung und Test des Scheduling-basierten Algorithmus. Dabei werden aus den Bewegungsprimitiven Steuerkommandos für die untere Ebene abgeleitet. Bewertung des Algorithmus hinsichtlich seiner Funktionsfähigkeit auf der realen Maschine.
- Anlyse der erforderlichen steuerungs- und regelungstechnischen Struktur der unteren Steuerungs-Ebene(n) hinsichtlich informationstechnischer Abhängigkeiten / Struktur und notwendiger Zeitvorgaben, die durch das mechatronische System bedingt sind (z.B. Häufigkeit der Abarbeitung, Reaktionszeiten, Jitter)
- Bestimmung möglicher Betriebs-/Aktivitätsmodi (z.B. Sensoreneinsatz, Strukturumschaltung von Regelkreisen), daraus Ableitung von Task- und Nachrichten-Parametern.
- Entwicklung eines geeigneten fehlertoleranten CPU- und Kommunikations-Schedulers zur dynamischen Planung dieser Tasks und Nachrichtenmengen.
- Implementierung und Test der funktionellen und Scheduling-Elemente. Bewertung der Funktion unter realen Bedingungen.