| | IVS | FIN | OvGU | |
Echtzeitsysteme und Kommunikation |
Dieser Internetauftritt wird nicht länger gepflegt. Bitte besuchen Sie unsere neue Seite unter: euk.cs.ovgu.de

Labor : Kurt 2
Kurt II - ein mobiler Kleinroboter
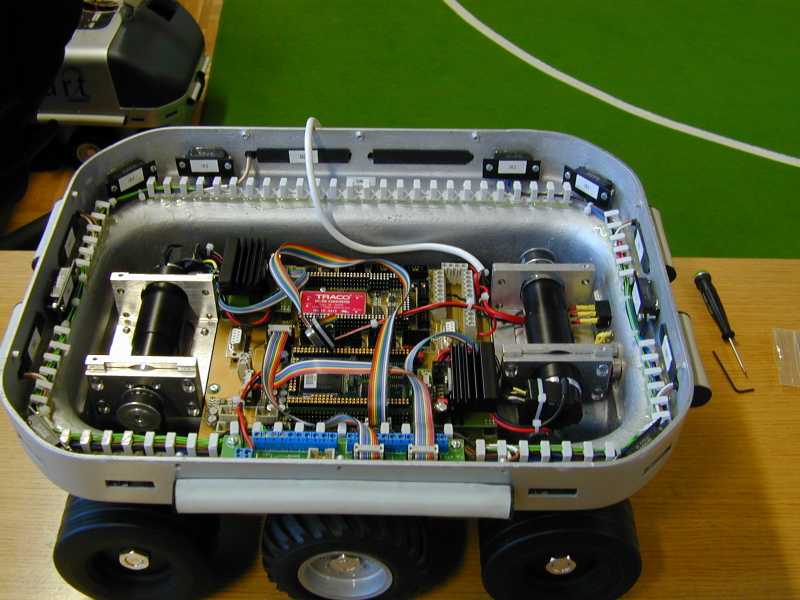

Technische Spezifikation
| Hardware | |
|---|---|
| Prozessoren | Pentium
Mikrocontroller 80C167 |
| Kommunikation | interner CAN-Bus
IEEE 803.11 Funk-LAN |
| Sensorik | Infrarot-Entfernungssensoren
Berührungssensoren |
| Software | |
| PC | WindowsNT/CE 3.0 / RTLinux
Programmiersprache C/C++ |
| µController | feste Firmware (für Praktikum) |
| Mechanisches System | |
| Geometrie | quaderförmiger Grundkörper
je 3 seitlich angeordnete Räder |
Bezugsquelle: KTO