Erste Aufgabe
Folge der Linie:
Die erste Aufgabe bestand darin mittels eines einzigen Lichtsensors einer schwarzen Linie zu folgen,
am Ende der Linie zu wenden und die Linie zurück zu verfolgen.
Umsetzung:
Der Roboter wird auf die Linie gesetzt und erkennt den Lichtwert als die Linie die er folgen soll. Ändert sich der
Wert um ca. ± 10, wurde die Linie verloren und der Suchalgorithmus setzt ein. Der Roboter dreht sich auf der
Stelle in einem immer größer werdenden Winkel bis die Linie wieder gefunden wurde. Die erste Drehung erfolgt
in die Richtung der letzten Drehung. Das erspart in einer Kurve die evtl. erste Suche in die falsche Richtung.
Wurde in einem Winkel von ca. 180° in beide Richtungen keine Linie gefunden, wendet der Roboter und verfolgt die Linie zurück.
Hierbei zeigen sich bereits erhebliche Driftfehler durch Rutschen und unterschiedliche, batterieabhängige Ansteuerung der Motoren.
Wurde in einem Winkel von ca. 180° in beide Richtungen keine Linie gefunden, wendet der Roboter und verfolgt die Linie zurück.
Hierbei zeigen sich bereits erhebliche Driftfehler durch Rutschen und unterschiedliche, batterieabhängige Ansteuerung der Motoren.
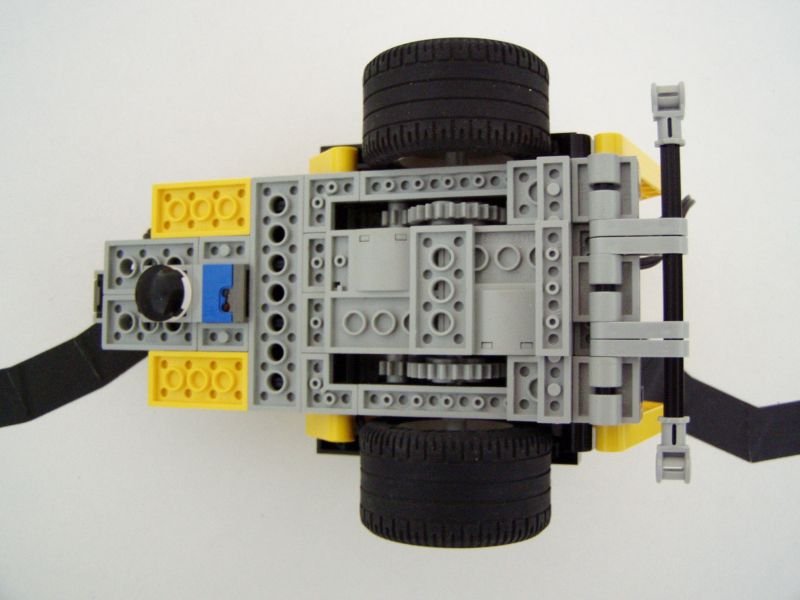
Fotos: