Softwarepraktikum Lego Mindstorm 2005
Die erste Aufgabe - Der ferngesteuerte Roboter
Die erste Aufgabe bestand darin, erstmal einen Entwurf für einen Roboter zu machen und diesen dann per Infrarot vom PC aus ferzusteuern.
Weil wir nur so voller Begeisterung waren, haben wir auch einfach drauf los gebaut. Dabei ist dann dieses kleine Monster rausgekommen.

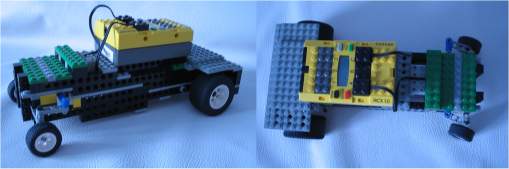
Uns wurde nach den ersten Fahrversuchen schnell klar, dass wir den Roboter für die erste Aufgabe nehmen können, wir uns aber für weitere Aufgaben ein anderes Konzept überlegen müssen, da der Roboter einen viel zu großen Wenderadius hat. Doch haben wir entschieden, für die erste Aufgabe ist er ausreichend. Nun ging es daran die Kommunikation mit dem PC zu bewerkstelligen.
Dabei haben wir uns zuerst ziemlich schwer getan, doch nach langwierigen Diskussionen und Recherchen in diversen Dokumenten war das Programmieren doch eigentlich recht einfach. Wir senden über den IR-Tower einfach ein Byte, fangen dies im RCX ab und werten es aus. Daraufhin reagiert der RCX und führt den jeweiligen Befehl aus. Wir setzen natürlich LeJos als Umgebung vorraus, da wir auf diverse Bestandteile davon zugreifen. Nun haben wir noch eine simple grafische Oberfläche erstellt und konnten nun per Mausklick den Roboter fernsteuern.
Quelltext Empfänger