Finale Aufgabe
Aufgabe
Zwei Roboter verfolgen eine Linie, wobei der vordere führt. Der Abstand sollte möglichst gleichbleibend sein, ebenso sollten die beiden Roboter am Ende der Linie wenden, die Rollen tauschen und zurück fahren.Realisierung
Die Verfolgung der Linie wurde schon in Aufgabe 1 bearbeitet. Die weiteren Probleme wurden mittels Kommunikation der Roboter via Bluetooth unter zuhilfenahme des Ultraschallsensors gelöst.Lösung
Gleichbleibender Abstand
Die Lösung des Problems unterteilten wir in 2 Teile.
1. Teil
Als erstes stoppt immer der Roboter der gerade nicht die Linie sucht.2. Teil
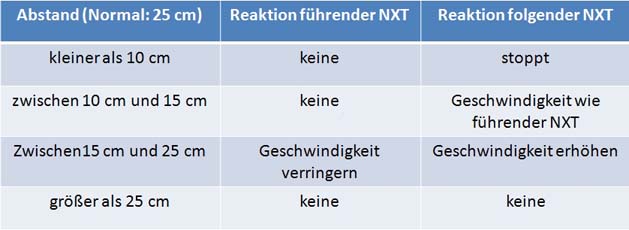
Ausserdem messen wir den Abstand zwischen den beiden Robotern, wobei der hintere Roboter den Abstand zum vorderen misst. Die Übermittlung des aktuellen Zustandes erfolgt per Bluetooth.
Wenden und Rollentausch