Bilder unserer Robots
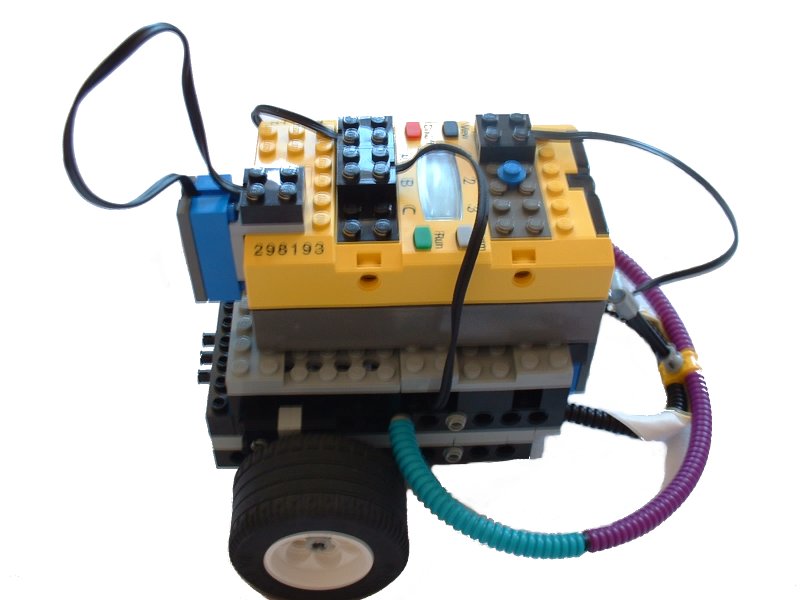
Erste Version
Das war unser erster Roboter, der auf der Linie entlang fahren sollte, was er auch meistern konnte. Da wir viele Zahnräder verwendet haben und eine hohe Übersetzung hatten, war er jedoch sehr langsam. Aufgrund der neu gewonnenen Kenntnisse in Bezug auf Aufbau und Bewältigung des Parkours entschlossen wir uns die Konstruktion zu verwerfen und komplett neu zu entwerfen.




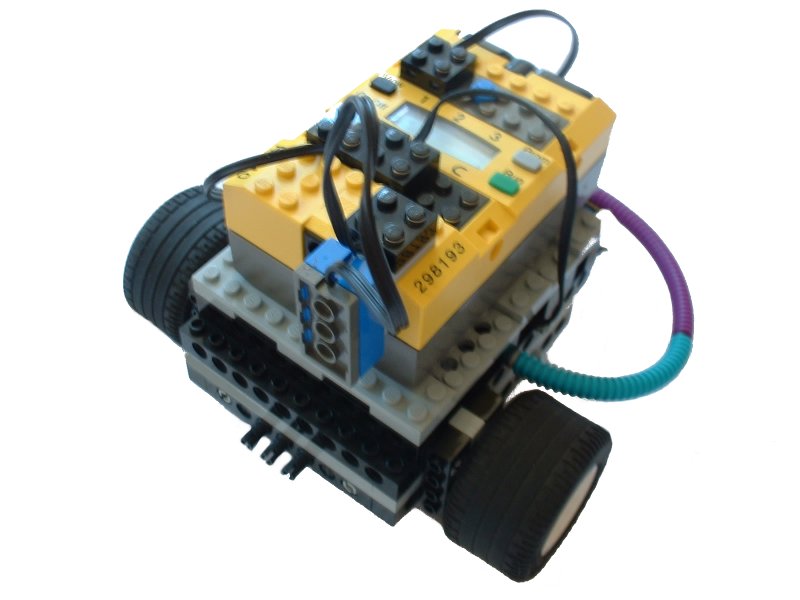
Kompakt
Es entstand der Grundaufbau für alle fortgeschrittenen Aufgaben. Das Grundgerüst hatten wir sehr stabil gemacht und die Übersetzung war jetzt ein guter Mix aus Schnelligkeit und Kraft. Nach einer Zwischenversion mit zwei Sensoren seht ihr hier die einsensorige Variante. Dieser Robot diente uns auch als Vorlage für die finalen Robots.


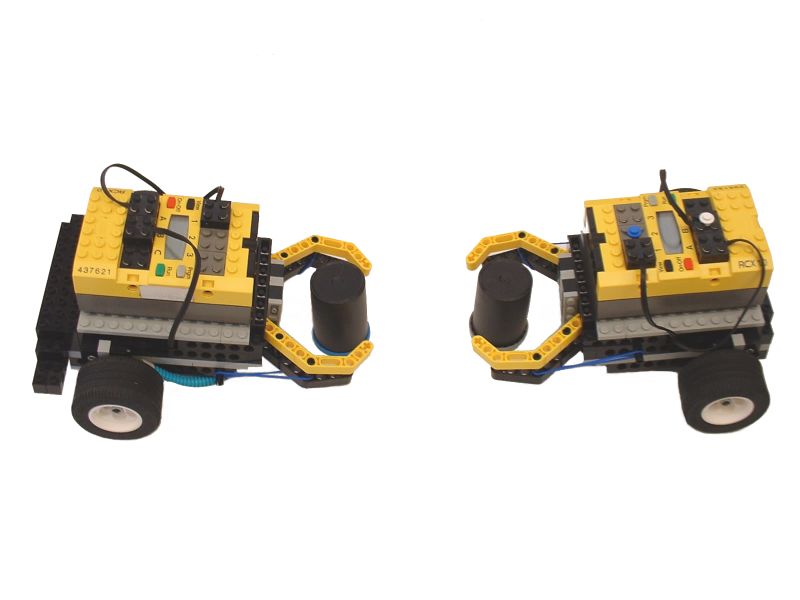
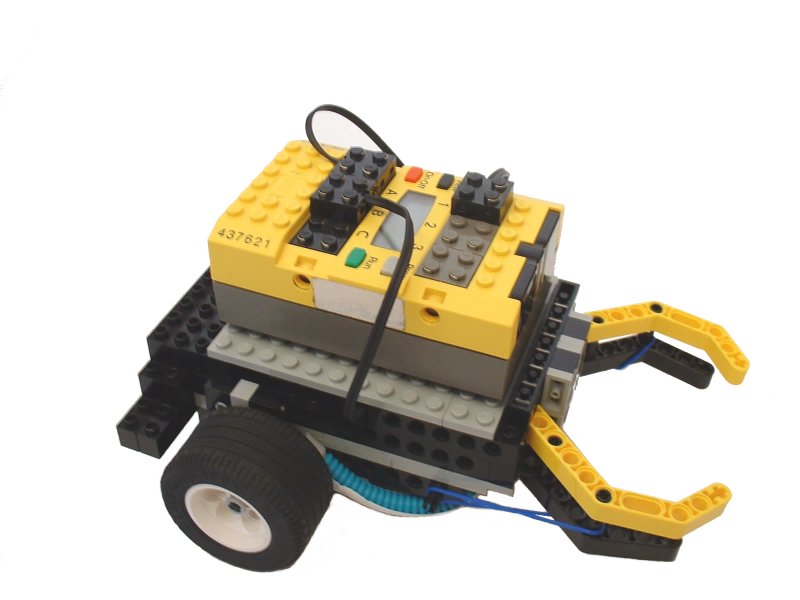
Roboter der finalen Aufgabe
Mit diesen beiden Bots wurde die Endaufgabe gelöst. Sie entstammen beide dem Vorgängermodell und unterscheiden sich nur minimal voneinander. Der Rampenroboter besitzt am Hinterteil zusätzliche Gewichte, während der Bodenrobo durch den weißen Punkt auf dem Motorkontakt zu erkennen ist.



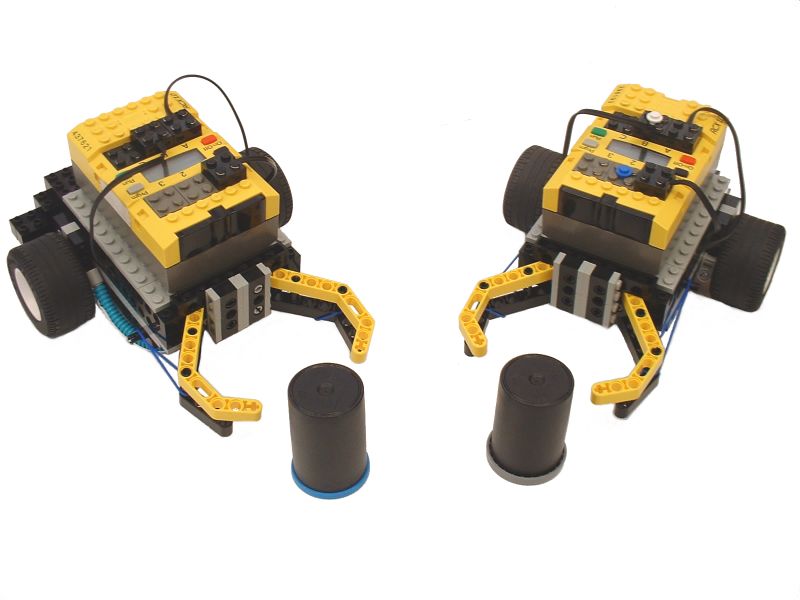
Hier nochmal beide Robots zusammen.