
Linie
Aufgabe:
Bei unserer zweiten Aufgabe, sollten wir einen Roboter bauen, der einer Linie folgt.
Idee:
Hier ist die Idee natürlich nicht so leicht, wie bei der Aufgabe mit dem Quadrat. Bei diesem Problem muss man zum ersten Mal mit Sensoren arbeiten, dabei wäre es natürlich am sinnvollsten den Lichtsensor zu nehmen.
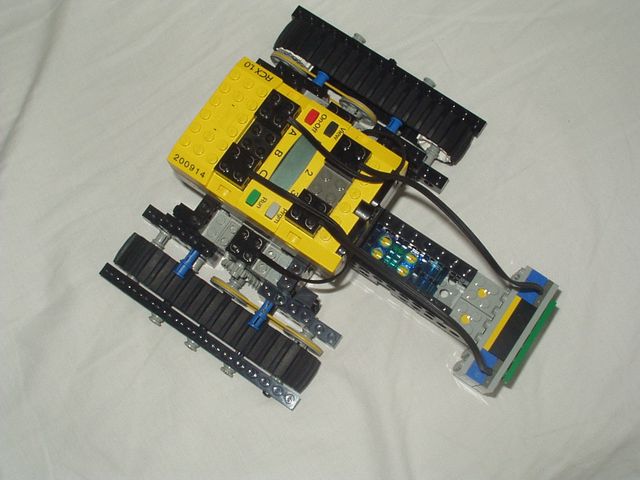
Da das Kettenfahrzeug aus der ersten Aufgabe recht gute Fahreigenschaften aufwies, kann es für diese Aufgabe sehr gut genutzt werden. Dabei könnte man nun zwei Lichtsensoren am vorderen Teil des Lego-Roboters befestigen.
Der wichtigste Gedanke hierbei wäre es wohl das Fahrzeug sich an der Linie orientieren zu lassen. Würde sich nun einer der Sensoren von der Linie entfernen, so ändert sich auch die Lichtintensität und der Lego-Roboter muss somit seine Richtung ändern um auf der Linie zu bleiben. So kommt es nun drauf an, welcher Sensor von der Linie abweicht. Ist der linke Sensor "betroffen", so muss sich das Fahrzeug nach rechts drehen und ist der rechte Sensor nicht mehr auf der Linie, so muss sich dementsprechend das Fahrzeug nach links drehen. Mit diesen einfachen algorithmischen Grundgedanken, sollte es nun möglich sein, dass das Fahrzeug der Linie folgt.
Lösung:
An das vorhandene Fahrzeug haben wir nun ein Modul angebracht, auf dem die beiden Lichtsensoren montiert sind. Diese beiden Sensoren sind direkt nebeneinander angebracht, so dass sie beide auf die Linie zeigen (diese ist schwarz und entsprechend breit).
Nun haben wir erst einmal probiert, wie die beiden "Roboter-Augen" auf Schwarz und Weiß reagieren. Dabei ist es natürlich wichtig, was für eine Zahl auf dem RCX steht.
Nachdem die Lichtstärken gemessen wurden, haben wir angefangen den Quellcode zu erstellen. So werden am Anfang die Sensoren auf der Linie stehen und nach dem einschalten des Fahrzeuges wird der Roboter losfahren. Misst ein Sensor, das der Untergrund nicht mehr schwarz sondern in unserem Fall weiß ist, hält der Roboter an und korrigiert seine Lage nach der obigen Idee. Diese jetzt sehr verständliche Prozedur führt er nun solange aus, bis er vom Anwender gestoppt wird.